СУВД состоит из следующих компонентов:
1. Вычислитель СУВД, включающий:
2. Панели местного управления ВД левого и правого бортов.

3. Средства дистанционного управления и контроля, размещаемые на пульте управления судна в РР, в составе:
-
трехкоординатный джойстик;
-
штурвал;
-
панель управления и контроля;
-
панели простого дистанционного управления левого и правого борта;
4. Блок коммуникационного оборудования.
5. Комплект переносного пульта управления в составе:

Структурная схема СУВД

Система обеспечивает для каждого ВД:
-
перемещение поворотного сопла от 25 ° одного борта до 25 ° другого борта в любом направлении не более чем за 4 с;
-
перемещение реверсивной заслонки от одного крайнего положения до другого в любом направлении не более чем за 6 с;
-
ограничения угла перекладки поворотного сопла и угла перекладки реверсивной заслонки в заданных пределах.
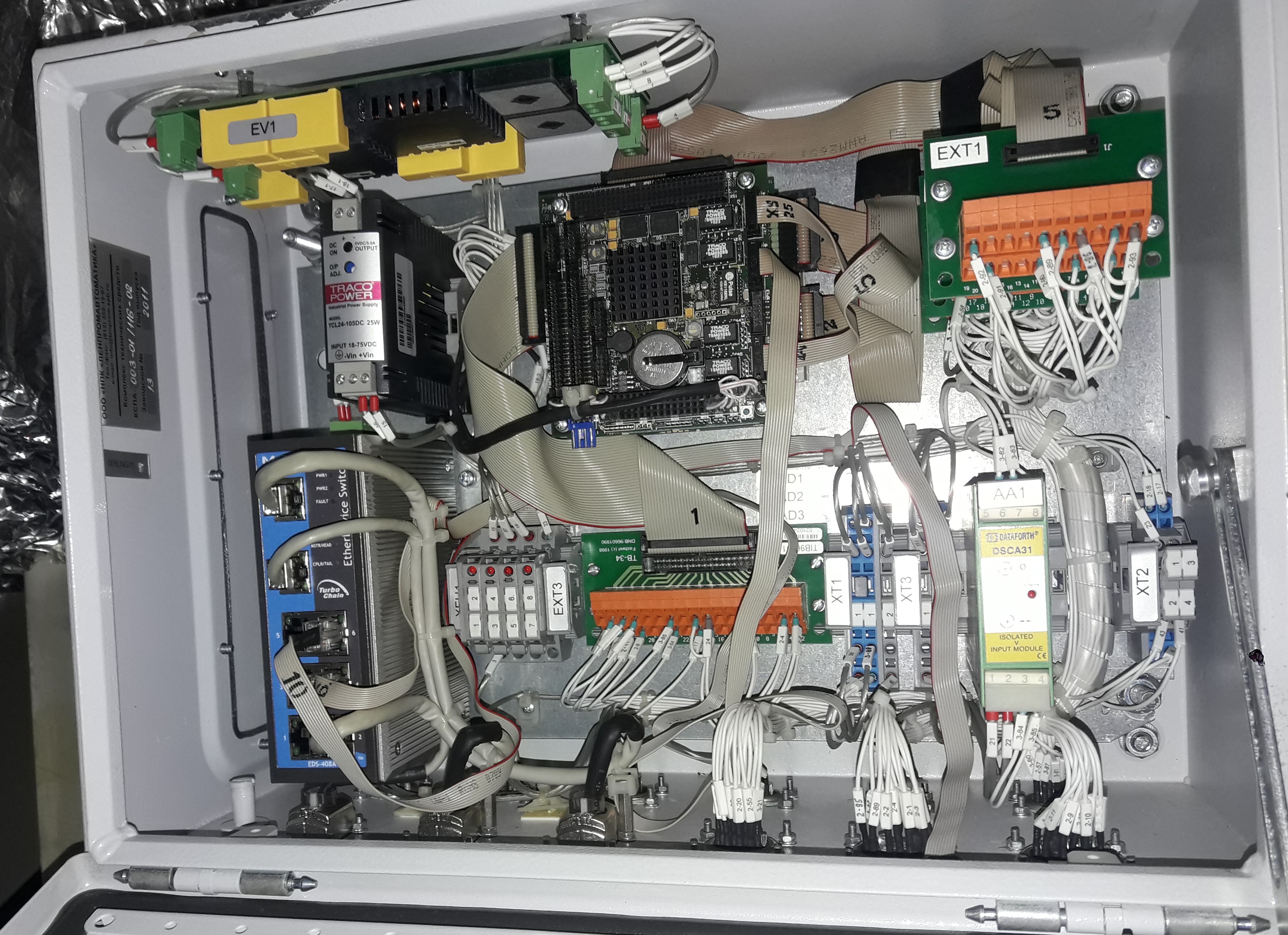
Вычислители предназначены для реализации формирования заданных положений сопел и заслонок, а также заданных частот вращения ГД. Реализацию функций системы по управлению ВД обеспечивает программное обеспечение контроллера.
Прием сигналов частоты вращения ГД, гальваническое разделение и преобразование с последующей передачей в контроллер осуществляется через устройства связи с объектом (УСО). В качестве УСО в системе используется нормализатор сигналов напряжения постоянного тока. Дискретные сигналы выдаются через реле.
Резервные органы управления располагаются на панелях местного управления ВД и простого дистанционного управления ВД.
Панели местного управления ВД предназначены для управления поворотными соплами и заслонками ВД из ахтерпика в неследящем режиме при отказе средств дистанционного управления.
Основными органами дистанционного управления системы являются трехкоординатный джойстик и штурвал. Прием и преобразование сигналов от штурвала и трехкоординатного джойстика и ввод их в вычислители обеспечивает блок коммуникационного оборудования системы.
Для управления с пульта РР в системе предусмотрена панель дистанционного управления и контроля. Панели дистанционного управления (ПДУ) предназначены для выполнения следующих функций:
-
управления соплами и заслонками ВД, а также частотой вращения ГД в неследящем режиме;
-
индикации положения сопел и заслонок ВД.
Кроме этого, соплами, заслонками и частотой вращения ВД, установленными на судне, можно управлять при помощи переносного пульта управления (ППУ).
Данные самодиагностики, сообщения АПС и параметры, требующие документирования, вычислители СУВД передают на рабочие станции СУИ и СУТС.
Обмен данными с другими системами (СУТС и СУИ) осуществляется по каналу Ethernet через коммутаторы сети Ethernet, входящие в состав СУИ и СУТС. СУВД принимает от СУТС обобщенный сигнал готовности технических средств судна, обеспечивающих работу СУВД.
Для обеспечения безопасности судна в системе реализовано резервирование каналов передачи данных между вычислителями СУВД и вычислителями СУИ и СУТС.